

作者:姚绍杰 日期:2024年03月07日
近日,计算机科学领域国际顶级刊物《IEEE Transactions on Industrial Informatics》 (一区TOP,IF 12.3)报道了伟德国际BETVLCTOR协同控制团队在拒绝服务攻击下分布式定位的研究进展,相关成果以“Barycentric Coordinate-Based Distributed Localization for Mobile Sensor Networks Under Denial-of-Service Attacks”为题在线发表。
无线传感器网络作为一种新型的信息采集和处理技术,具有广阔的应用前景,如车载网络、物联网,入侵监控、目标跟踪、智能家居系统、智能城市等应用前景。然而,无论是在地理环境监测中还是在医疗患者跟踪中,数据采集都是不准确的,如果没有相应的位置信息,甚至可能失去采集的重要性。因此,获取网络中传感器节点自身的位置信息对于绝大多数应用都是至关重要的。
定位是保证无线传感器网络在不同环境下有效运行的关键技术。由于网络攻击在现实应用场景中的普遍存在,因此确保在拒绝服务攻击下定位的准确性是一个日益令人关注的问题。现有的研究主要集中在拒绝服务攻击下静态传感器网络的分布式定位上。本文旨在扩展拒绝服务攻击下的移动传感器网络分布式定位的研究。在拒绝服务攻击下,传感器节点之间的通信具有间歇性特点,将导致所有传感器节点之间的通信网络具有时变特性,这对精确定位提出了挑战。为了克服这一挑战,文中提出了一种利用相对重心坐标和距离测量的分布式迭代定位算法。基于图组合和次随机矩阵的混合方法,对定位算法的收敛性、速度和复杂度进行了综合分析。最后,通过实验验证了理论计算结果。

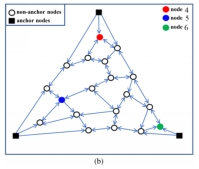
图1 机器人间通信示意

图2 拒绝服务攻击下移动传感器网络节点间通信
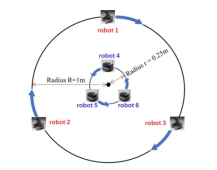
图3 机器人的移动轨迹和范围
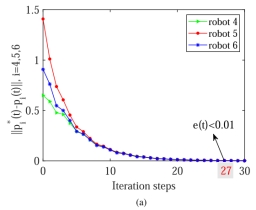
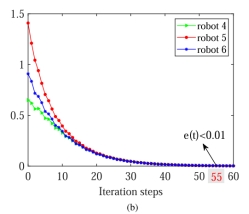
图4 实验测试结果
伟德国际BETVLCTOR为该论文的第一单位,协同控制团队石磊教授为第一作者,协同控制团队周毅教授为通讯作者。该研究工作为bevictor伟德官网、电子科技大学、河南省车联网协同技术国际联合实验室的联合研究成果,受到国家自然科学基金、国家重点研发计划国际战略创新项目的支持。



微信扫码关注
