

作者:孙震 日期:2024年01月10日
近日,工程技术领域国际顶级刊物《IEEE Transactions on Circuits and Systems I: Regular Papers》 (一区TOP,IF 5.1)报道了伟德国际BETVLCTOR协同控制团队在多智能体系统协同控制方向的研究进展,相关成果以“Flocking Dynamics for Cooperation-Antagonism Multi-Agent Networks Subject to Limited Communication Resources”为题在线发表。
集群是指蜂群、鱼类、鸟类等生物群体利用一些简单的规则和环境信息,通过个体之间的相互作用,最终形成稳定有序的群体运动。目前,群集控制已先后应用于各个领域,包括机器人编队和无人机等。
本论文探讨了通信资源有限的多智能体网络的群集动态行为,其中智能体之间存在协作和对抗关系。考虑到通信资源的不足,设计了一种具有边缘异步通信的分布式控制协议,其中在每次瞬间只唤醒部分通信链路来进行信息传输。利用超随机矩阵的乘积方法,严格地检验了动态模型的收敛性。利用该方法建立了代理间合作和对抗关系的代数条件,使整个多智能体网络以群集动态出现。最后,通过计算机仿真对理论结果进行了验证和验证。
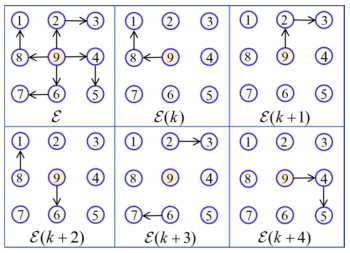
图1 有限的通信资源下多智能体通信示例图
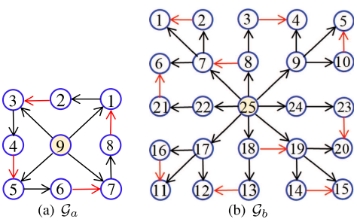
图2 描述多智能体间相互作用的两个符号有向图
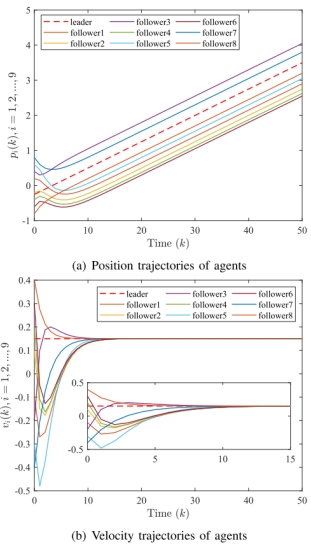
图3 智能体在两个不同的权重函数下的状态轨迹
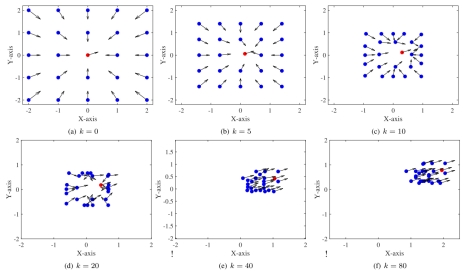
图4 智能体在不同时刻的位置
伟德国际BETVLCTOR为该论文的第一单位,协同控制团队石磊教授为第一作者,协同控制团队副教授敖天勇为通讯作者。该研究工作为bevictor伟德官网、电子科技大学、河南省车联网协同技术国际联合实验室研究成果,受到国家自然科学基金项目、国家重点研发计划国际战略创新项目、河南省科技发展项目的支持。
论文链接:https://doi.org/10.1109/TCSI.2023.3347073



微信扫码关注
