

作者:孙震 日期:2023年11月26日
近日,IEEE会刊《IEEE Transactions on Network Science and Engineering》 (二区,IF 6.6)报道了伟德国际BETVLCTOR协同控制团队在多智能体系统协同控制方向的研究进展,相关成果以“Event-Based Bipartite Containment Control for Multi-Agent Networks Subject to Communication Delay”为题在线发表。
在控制工程和机器人技术领域,开发顺序算法来部署一组机器人来完成各种任务是非常重要的。通常这些算法是从集中的角度设计的,例如,可以派遣一组移动机器人在危险环境中进行救援,或者在工业中设置多个机器人武器进行协同操作任务。我们所说的“集中”是指具有强数值计算能力的单一单元在可容忍的时间内完成计算任务。然而,在21世纪,合作控制任务中的实际数据集规模正在快速增加,而微处理器技术的发展由于物理障碍而放缓。这些观察结果激发了通过互连节点网络(网络系统)开发先进的分布式控制算法,通过本地通信来分解和解决全局问题,以应对可扩展性、鲁棒性和有限通信资源等方面的挑战。
本文基于事件触发工具研究了具有协作竞争交互和通信延迟的多智能体网络的二分控制问题。每个智能体在一系列事件触发的时间瞬间向邻居发送信息,并在其自己的事件时间更新控制器。提出了一种新的虚拟符号图和虚拟系统动力学的构造方法。构造了一个确定事件时间的特定触发函数,其中状态相关函数和指数衰减函数共同引入作为比较项。给出了事件触发算法的收敛条件,包括图拓扑的要求、系统动力学和参数的选择。得到了时间t∈[0,∞)的连续事件之间的时间间隔的严格下界,因此网络事件触发系统不表现出Zeno行为。此外,为了解决状态依赖触发函数需要其邻居的连续信息的问题,提出了一种替代触发函数,该函数可以仅利用邻居的离散状态信息保守地近似触发函数的演化。这就避免了智能体之间的持续通信。仿真验证了所提出的基于事件的二分包含控制方案的性能。
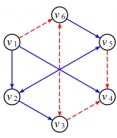
图1 智能体间的有向通信图
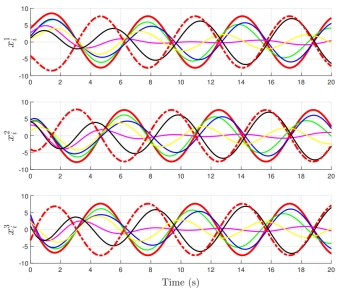
图2 智能体的状态轨迹实验结果
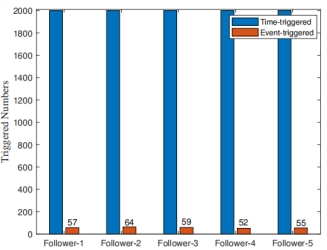
图3 时间触发与事件触发方案的触发次数比较结果
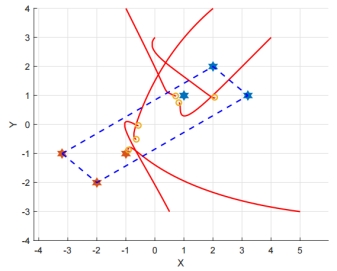
图3 智能体的运动轨迹实验结果
伟德国际BETVLCTOR为该论文的第一单位,协同控制团队石磊教授为第一作者。该研究工作为bevictor伟德官网、电子科技大学、河南省车联网协同技术国际联合实验室研究成果,受到国家自然科学基金项目、四川省自然科学基金项目、四川省科技部项目的支持。
论文链接:https://doi.org/10.1109/TNSE.2023.3336363



微信扫码关注

